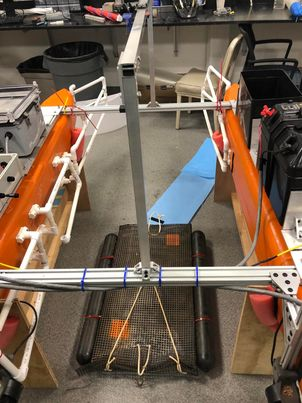
During my second year at MIT I did research in the Sea Grant Lab. I worked on the mechanics of an oyster flipping robot. The flipping mechanism was placed on an autonomously-run boat that could navigate rows of oyster farms and flip the cages to reduce ocean related buildup. An important aspect of the project was to design the boat to work in already existing farms as opposed to creating farms around the device.
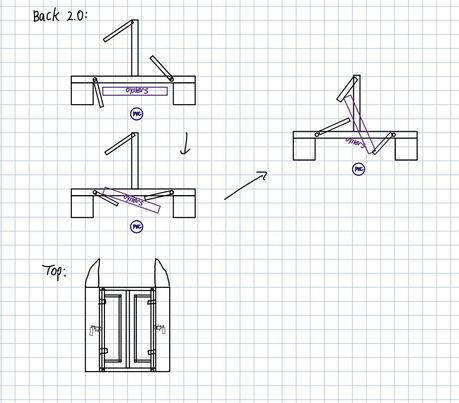
I was in charge of designing the flipping mechanism. This included three arms, two powerful arms on the sides to flip it almost all the way over, and a third arm on top to ensure the cage flipped. This design was especially suited to farms because it reduced excessive twisting of the main line that all the cages were connected by, increasing the lifespan of the line.
I was in charge of designing the flipping mechanism. This included three arms, two powerful arms on the sides to flip it almost all the way over, and a third arm on top to ensure the cage flipped. This design was especially suited to farms because it reduced excessive twisting of the main line that all the cages were connected by, increasing the lifespan of the line.