While working at Macco Robotics in Spain, I was asked to design a 5 DOF robotic arm for their humanoid bartender robot, Kime. The arms they were using at the time were outsourced, and did not move in a ‘natural’ way.
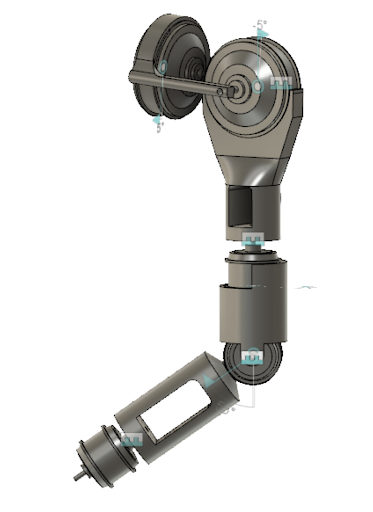
I created a CAD model for them that used 5 hub motors. By arranging their positions with respect to the body, I was able to achieve natural-looking motion. These motors were modeled off of online sellers, and their respective torques were up to the task of carrying each other and a full handle of alcohol. These arms did not need extremely high precision as there is a large margin of error available while still performing the task. Therefore the motors would be able to function only using a rotary encoded paired with either a small 6:1 ratio gearbox or no gearbox.
I created a CAD model for them that used 5 hub motors. By arranging their positions with respect to the body, I was able to achieve natural-looking motion. These motors were modeled off of online sellers, and their respective torques were up to the task of carrying each other and a full handle of alcohol. These arms did not need extremely high precision as there is a large margin of error available while still performing the task. Therefore the motors would be able to function only using a rotary encoded paired with either a small 6:1 ratio gearbox or no gearbox.